
Con questo articolo, apro una serie di tutorial che descriveranno l’uso di alcuni sensori sia su Arduino che su Raspberry Pi. Comincerò con il PIR un sensore comunemente utilizzato per la rilevazione dei movimenti all’interno di una stanza o anche agli esterni. Ci sarà capitato spesso di camminare lungo un giardino o entrare in una stanza e improvvisamente vedere accendersi un faro o la luce. Bene, alla base di questo c’è proprio un sensore PIR posizionato ad un angolo. Quindi è importante conoscere che cosa sono e capirne il loro funzionamento. Inoltre nei due articoli a seguire, saranno presentati vari esempi per imparare a realizzare da soli progetti che facciano uso di questi sensori sia con Arduino che con Raspberry.
[wpda_org_chart tree_id=24 theme_id=50]
PIR (Pyroelectric “Passive” InfraRed) Motion sensor
I sensori PIR sono più precisamente dei sensore di movimeto a rilevazione infrarossa e vengono spesso utilizzati nei sistemi di allarme o per l’illuminazione automatica. Certamente li avrai già notati prima di adesso: quei sensori bianchi che spesso intravedi posizionati agli angoli delle stanze non sono delle telecamere bensì dei PIR.

Tutti gli oggetti al di sopra dello zero assoluto emettono radiazione infrarossa. La radiazione infrarossa non è percebilie dalla vista umana, ma può essere rilevata dai componenti elettronici all’interno di questi moduli.
Il sensore viene definito passivo perchè non invia alcun segnale all’esterno per rilevare il movimento, bensì si regola per registrare la “firma” infrarossa dell’ambiente circostante. Poi immediatamente sonda l’ambiente alla ricerca di qualsiasi variazione. Qualsiasi oggetto in movimento nella stanza corrisponderà ad una variazione nella “firma” infrarossa precedentemente rilevata. Questa variazione verrà letta dal sensore PIR come un movimento e segnalata al sistema ricevente.
Per quanto riguarda Arduino e Raspberry, sono disponibili in commercio dei moduli PIR a basso prezzo e facilmente reperibili online. Questi moduli PIR sono molto economici e le loro dimensioni ridotte permettono di poter essere facilmente utilizzati nei nostri progetti. La qualità di questi moduli PIR varia a seconda della loro sensibilità, e soprattutto per la distanza di rilevazione. Naturalmente maggiore sarà la qualità maggiore sarà il prezzo. La figura sottostante mostra uno di questi moduli PIR.
Per quanto riguarda Arduino e Raspberry, sono disponibili in commercio dei moduli PIR a basso prezzo e facilmente reperibili online. Si possono trovare piccoli sensori PIR da utilizzare per qualsiasi customizzazione (come quelli che vedremo in questo tutorial) oppure si possono trovare dei moduli già pronti per essere montati sulle pareti come per esempio il PIR 180 IP44 della Brennenstuhl.
Questi moduli PIR sono molto economici e le loro dimensioni ridotte permettono di poter essere facilmente utilizzati nei nostri progetti. La qualità di questi moduli PIR varia a seconda della loro sensibilità, e soprattutto per la distanza di rilevazione. Naturalmente maggiore sarà la qualità maggiore sarà il prezzo. La figura sottostante mostra uno di questi moduli PIR, più precisamente il modello SE-10 (datasheet).
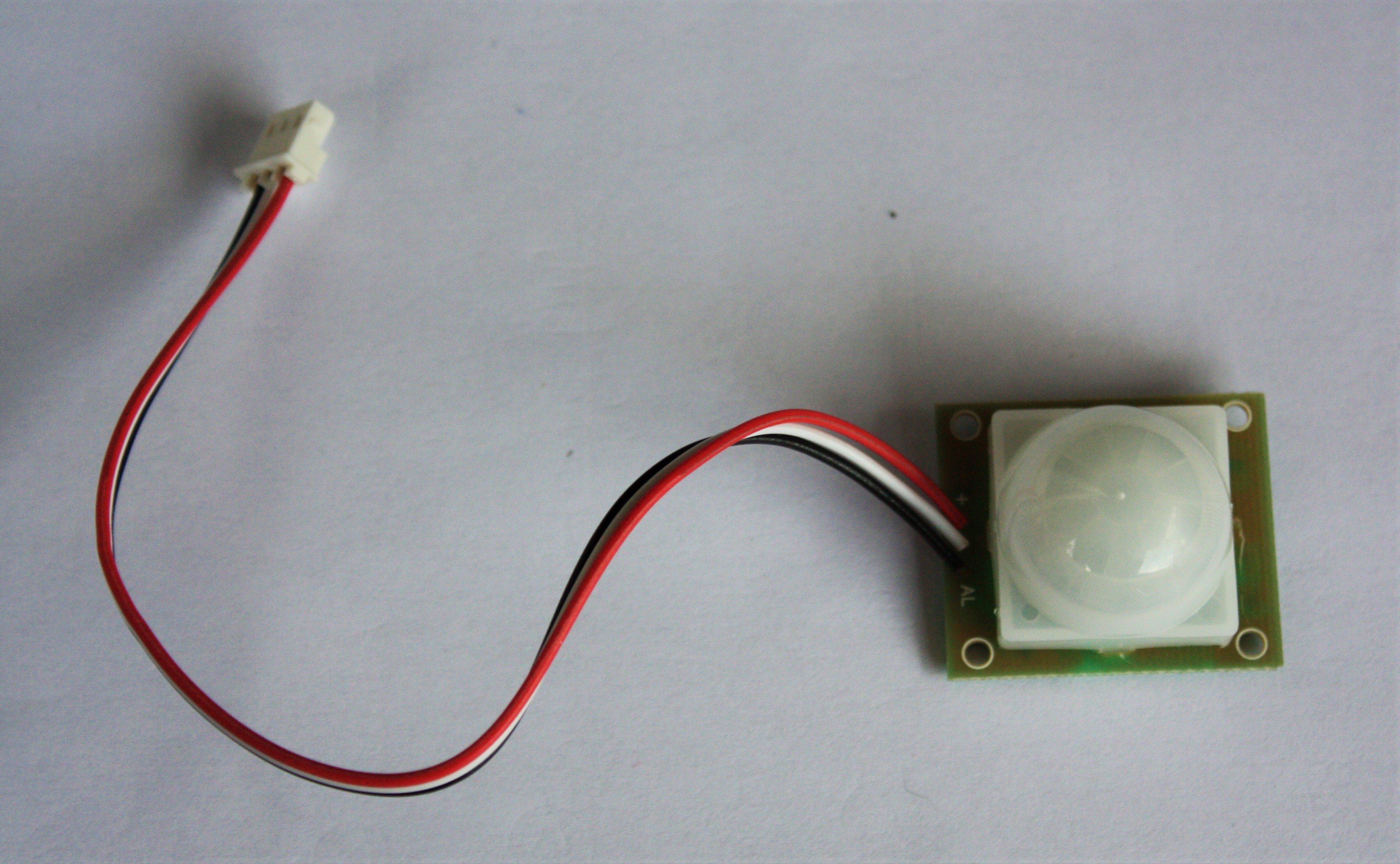
Questo sensore funziona perfettamente con una alimentazione da 5-12V. Una volta alimentato Il PIR impiegherà da 1 a 2 secondi per effettuare una “snapshot” infrarossa dell’ambiente circostante, poi qualsiasi variazione verrà segnalata come movimento.
Esiste anche un altro modello molto diffuso, chiamato HC-SR501 ,
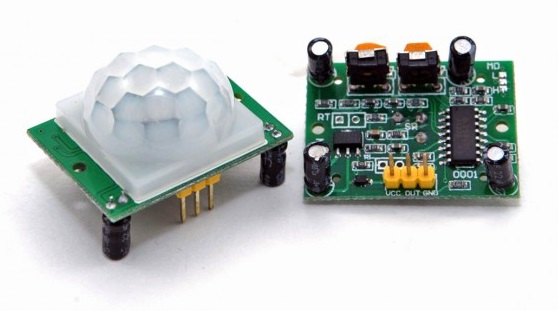
Anche questo sensore può essere alimentato da una tensione 5-12V. Inoltre ha la possibilità di poter essere regolato. Infatti il segnale in uscita, la distanza di rilevamento ed il tempo di ritardo possono essere selezionati tramite jumpers e trimmer.
Come funziona il sensore PIR
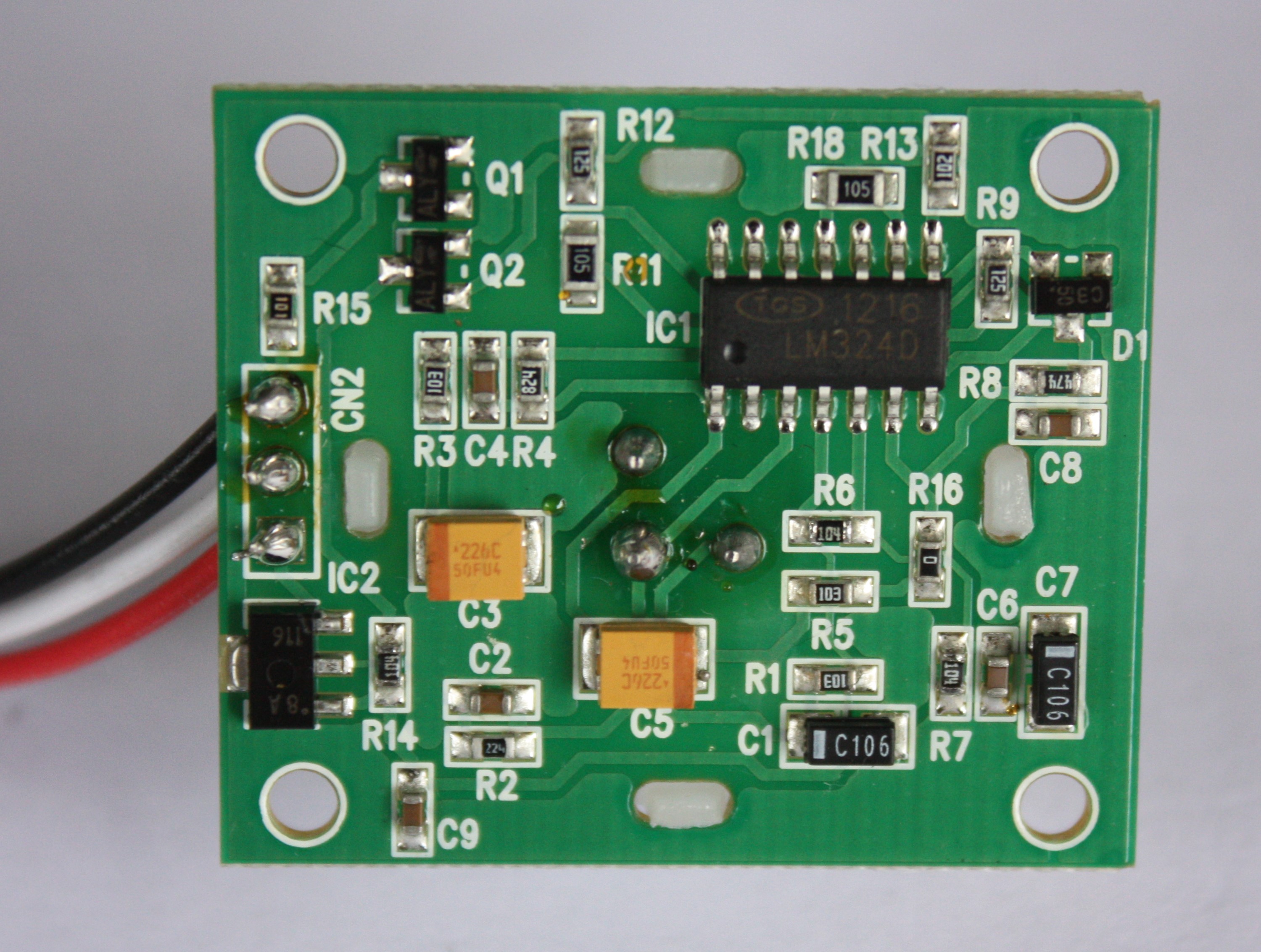
Il sensore PIR propriamente detto è in realtà un componente elettronico che si trova all’interno del modulo PIR, e più precisamente all’interno della capsula bianca semisferica (che come vedremo in seguito è una lente). Una volta rimossa la capsula dalla scheda è possibile vedere il sensore al centro della scheda elettronica (vedi figura sotto).
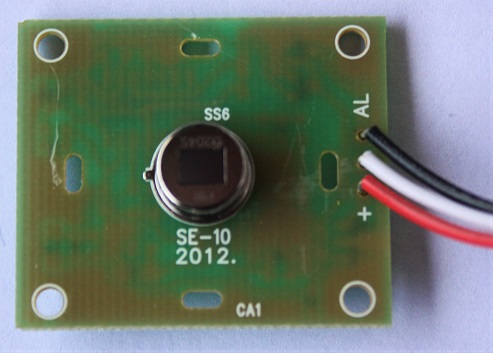
Nella parte superiore del sensore è visibile un quadrato nero. Questa in realtà è una finestra fatta di materiale trasparente all’infrarosso, generalmente una pellicola rivestita di silicio, che ha principalmente uno scopo protettivo. Al di sotto della pellicola sono presenti due slot fatti di un materiale sensibile all’infrarosso. Quando il sensore è in stato di IDLE (cioè non rileva alcun movimento), entrambe gli slot stanno rilevando la stessa quantità di IR proveniente dall’ambiente circostante (stanza, mura, pavimento, ecc…). Se un corpo caldo come un essere umano o un animale attraversa in qualche modo il campo “visivo” del sensore, verrà intercettato dapprima da uno dei due slot, causando un differenziale positivo tra i due slot. Quando il corpo caldo si allontanerà, allora sarà l’altro slot a rilevarlo, e quindi questa volta ci sarà un differenziale negativo tra i due slot. Questi variazioni di stato generano gli impulsi che a loro volta producono il segnale trasmesso dal sensore.
Nella figura seguente è spiegato in dettaglio il funzionamento del sensore mostrando in dettaglio il segnale emesso rispetto agli stimoli esterni. Questa figura è stata presa da un bellissimo articolo che spiega in dettaglio il funzionamento di questi sensori. Il riquadro A mostra il segnale che viene prodotto nei due casi in cui un soggetto si muove nelle due direzioni opposte rispetto al sensore. Il riquadro B mostra il segnale in uscita nel caso di due soggetti che si muovono nella stessa direzione ma a distanze diverse. Il riquadro C invece mostra il segnale in uscita prodotto da una persona che si muove nella stessa direzione ma a due velocità diverse.

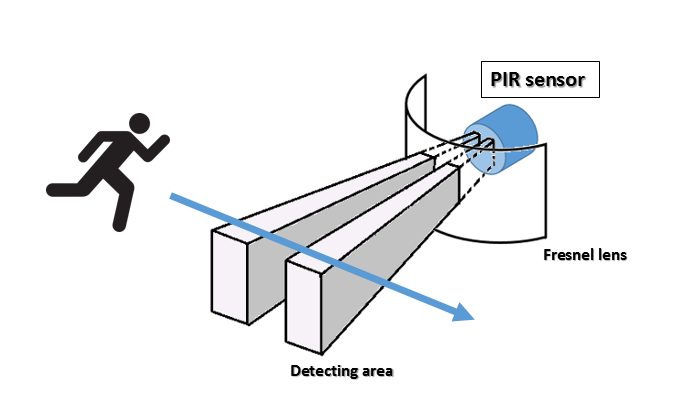
Ma adesso prestiamo attenzione alla capsula bianca che abbiamo rimosso dal modulo PIR per osservare il sensore interno. Se osserviamo la parte interna noteremo sulla superficie una serie di rilievi.

In realtà la capsula bianca semisferica è un lente, e più precisamente una lente di Fresnel. Questa lente ha il compito di espandere l’area di rilevazione dei due rilevatori infrarosso ad un volume semisferico che può comprendere anche un’intera stanza. Queste lenti condensano la luce infrarossa proveniente dal volume circostante focalizzandola in un punto preciso, la piccola finestra nera presente sulla sommità del PIR. La cosa interessante è che queste lenti anche se sono costituite da semplice plastica creata in stampi, funzionano egregiamente. Questo permette di avere moduli PIR a prezzo davvero contenuto.
Ecco un chiaro schema di quello che abbiamo appena detto (vedi qui).
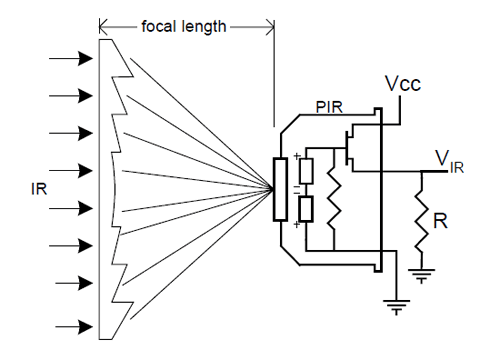
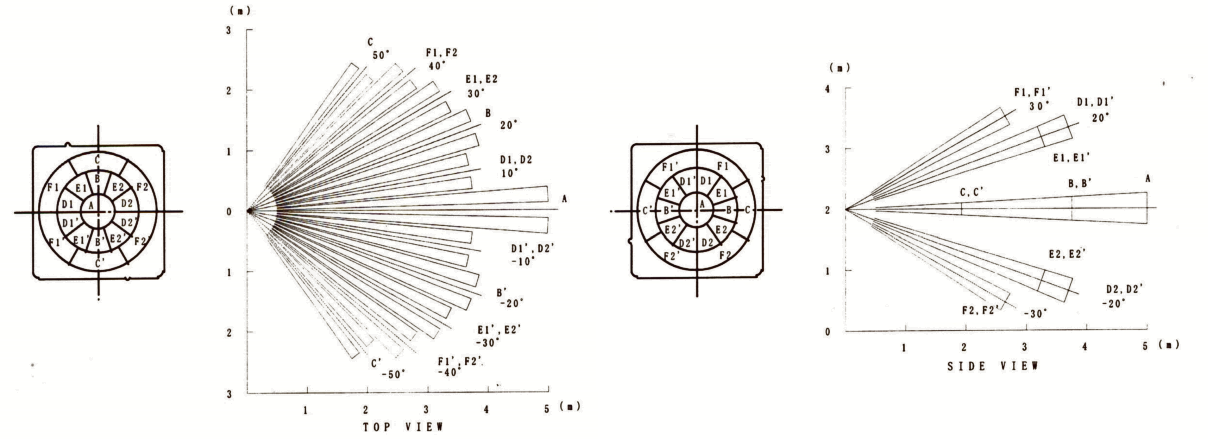
Nello schema sovrastante è rappresentata una lente piana. In realtà la capsula che abbiamo sul nostro modulo PIR è di forma semisferica e se la osservate attentamente noterete che è composta da molti piani Fresnel in modo da poter catturare e focalizzare la radiazione infrarossa proveniente da più direzioni possibili. Nella figura seguente è possibile vedere la mappatura della lente di Fresnel NL11NH come mostrato nel suo datasheet.
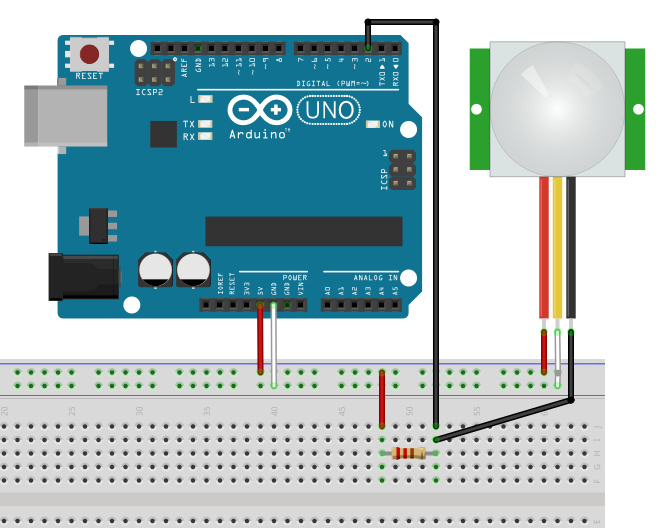
Come collegare il PIR
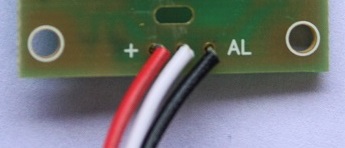
Tutti i moduli PIR sono caratterizzati da tre cavi in uscita da tre PIN in uscita disposti sul bordo della scheda. Un pin è per l’alimentazione a +5V, un pin è per il GND e l’ultimo è per il segnale di rilevazione (ALARM). Questo PIN emetterà un segnale ogni volta che un movimento verrà rilevato dal modulo PIR.
Sfrutteremo questa variazione di voltaggio, cioè il segnale, per trasmettere a Raspberry Pi, ad Arduino o ad altre schede, le informazioni su un relativo movimento. Queste schede in attesa di una variazione di voltaggio, si attiveranno agendo di conseguenza a seconda del programma in esecuzione.
Dovete fare attenzione però al fatto, che ogni modulo PIR presenta cavi con colorazione diversa. Anche l’ordine dei PIN non è sempre la stessa, quindi raccomando di consultare il datasheet del modulo PIR in vostro possesso, in modo da evitare errori durante il collegamento.
Nel mio caso, cioè con il modello SE-10 ho questa disposizione dei PIN.
Per la preparazione degli schemi elettronici io utilizzo Fritzing. Fritzing è un bellissimo software freeware che permette di realizzare schemi elettronici e grafici per tutotiale veramente gradevoli. Per chi è appassionato di tutorial vedrà spesso delle rappresentazioni grafiche fatte con questo software. Se siete interessati vi consiglio di leggere questo articolo su Fritzing.

Il modulo PIR può essere incluso nelle librerie di Fritzing importandolo dal progetto di adafruit su github (clicca qui per il modulo PIR, e andate su Raw per scaricare direttamente il fila da importare su Fritzing).
Conclusione
Adesso che abbiamo una certa familiarità con il sensore PIR, nei prossimi articoli potrai vedere come realizzare i tuoi progetti su Arduino o su Raspberry. Attraverso dei semplici tutorial, ti verranno presentate le nozioni base su come connettere il sensore alle schede e sulle funzioni da utilizzare per implementare il codice. Inoltre verranno presentate alcune possibili applicazioni di questi moduli PIR. A presto allora!
Complimenti per questo primo articolo della serie. Attendo impaziente gli altri.