Il progetto InMoov
InMoov è il primo robot open source realizzabile con stampanti 3D.
InMoov è un progetto di Gael Langevin, uno scultore e progettista francese. La sua idea principale è stata quella di poter realizzare un progetto, come quello di un robot, attraverso la cooperazione e la condivisione di tutti quelli che sono grado di contribuire in materia, lavorando attraverso una comunità di “builders”.

Quindi la forma attuale di questo progetto non è altro che il prodotto dell’esperienza di un numero considerevole di persone, ognuna delle quali ha contribuito nel suo campo, portando avanti così il progetto InMoov.
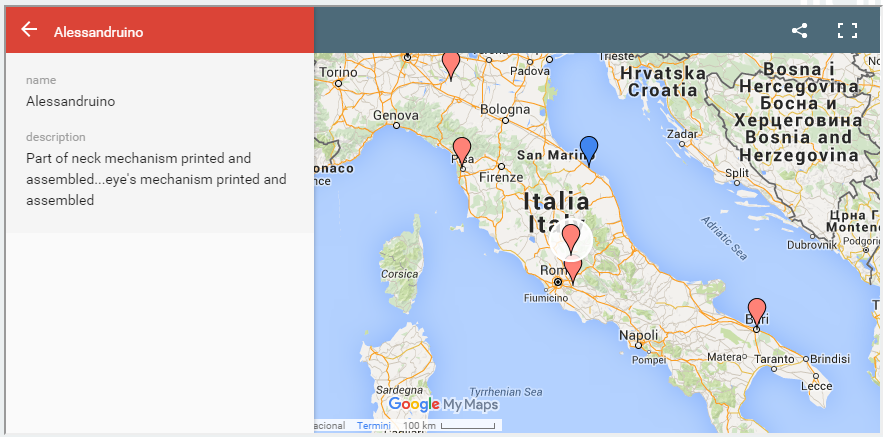
Sul sito ufficiale di InMoov è presente una mappa interattiva (vedi Fig.2) in cui è possibile vedere la locazione di tutti i builder che hanno contribuito o che stanno attualmente partecipando al progetto.

Cliccando su ogni marker è possibile risalire al builder e ad una breve descrizione sul suo contributo al progetto.
Costruisci il tuo InMoov
Sempre all’interno del sito ufficiale sono presenti tutte le istruzioni su come realizzare InMoov in ogni sua parte. In realtà, per realizzare questo splendido robot, non sono necessarie, nè grandi competenze nè particolari strumenti. L’unica componente davvero necessaria in questo genere di progetti è la passione.
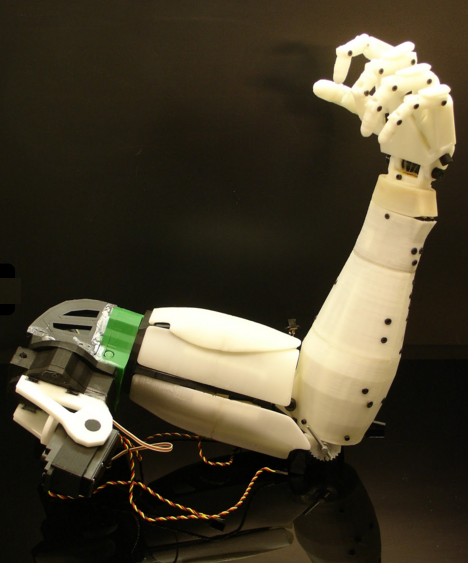
Il robot InMoov è stato progettato per essere sviluppato a componenti. Cioè è possibile sviluppare ciascuna delle sue parti separatamente, come per esempio una mano, la testa, la spalla, ecc. Quindi non è necessario realizzare l’intero progetto, ma è possibile dedicarsi ad una di queste sue componenti, concentrandosi in maniera particolare su di essa e apportando via via delle migliorie, e poi alla fine pubblicare nel sito contribuendo al miglioramento del progetto in generale. Questo è un po’ lo spirito del progetto.
Per cominciare a realizzare le varie componenti che vanno a far parte del robot InMoov è necessario per prima cosa:
- una stampante 3D con almeno un volume di stampa 12x12x12cm
- Arduino Uno e Mega come microcontrollori
- Un kit di servo motori HK15298B, Hitec HS805BB e MG996
- MyRobot Lab software
Per quanto riguarda la stampa 3D, il sito fornisce tutti i file STL necessari per realizzare ogni singolo componente.

Ognuno di queste componenti stampabili è ben illustrata nel sito, ed è possibile scaricare il suo file STL in maniera semplice e diretta, scegliendo visualmente la componente desiderata.
Il materiale generalmente utilizzato per la stampa di questi componenti è il PLA (acido polilattico) e l’ABS (acrilonitrile-butadiene-stirene), che sono entrambe polimeri termoplastici comunemente utilizzati per tutte le stampanti 3D a estrusione il cui costo è facilmente accessibile.
Una volta stampati questi componenti possono essere assemblati tra di loro tramite viti o direttamente incollati (con acetone per ABS, e con epoxy2 per PLA). Comunque l’assemblaggio di ciascuna parte del robot InMoov è dettagliatamente illustrata e spiegata all’interno del sito ufficiale.
Le Nervo Board
{kind=link}
{kind=link}
La realizzazione delle componenti di InMoov non si limita alla stampa delle sue componenti meccaniche, ma anche alla realizzazione di una serie di schede elettroniche adibite al controllo dei vari servo motori (servo boards) che attuano i movimenti delle articolazioni del robot umanoide.
A tale proposito Marten de Groot e Leon van der Horst hanno realizzato un set di schede chiamate Nervo Boards. Queste schede sono state progettate appositamente per gestire ia comunicazione tra microcontrollori di tipo Arduino Uno o Arduino Mega con le varie servo boards e sensori presenti pressochè in ogni componente del robot.
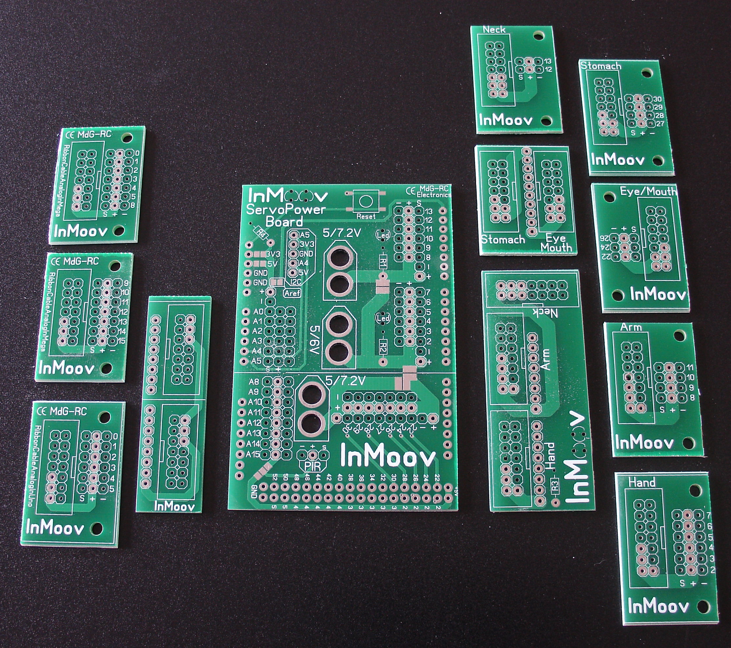
Un set di schede Nervo Boards è costituito precisamente da 11 mini breakout board di diversi formati e da 1 shield board. Se si desidera realizzare l’intero progetto del InMoov robot allora saranno necessarie due set di schede. Inoltre per ogni set di schede è necessario acquistare una serie di componenti da saldare su di esse, e alcune di esse sono stampabili in 3D (altrimenti si possono direttamente acquistare sul sito).
- 1x 3D printable SpacerConnectV1
- 1x 3D printable ShoulderConnectV1
- 3x 3D printable ConnectorV1
- 14x 2.54mm 2×7 Pin 14 Pin Straight Male Shrouded PCB Box header IDC Socket
- 14x 2.54mm Pitch 2×7 Pin 14 Pin IDC FC Female Header Socket Connector FC-14
- 3x 2.54mm 40 Pin Male Single Row Pin Header Strip
- 1x 2.54mm 3×40 Pin 120 Pin Right Angle Male Pin Header Strip
- 1x (up to 3, depending of your power sources and servos)RC XT60 Lipo Battery Connectors
- 1x 3 meters 14 Conductor Ribbon Cable
- 1x Momentary Tactile Tact Red Push Button Switch 5 Pin SMD SMT 6x6x3.7mm
- 4x Led 5v ( Optional, for lighting the InMoov Logo)
- 4x Resistor 470 ohm, yellow,violet,red, gold (Optional, for lighting the InMoov Logo)
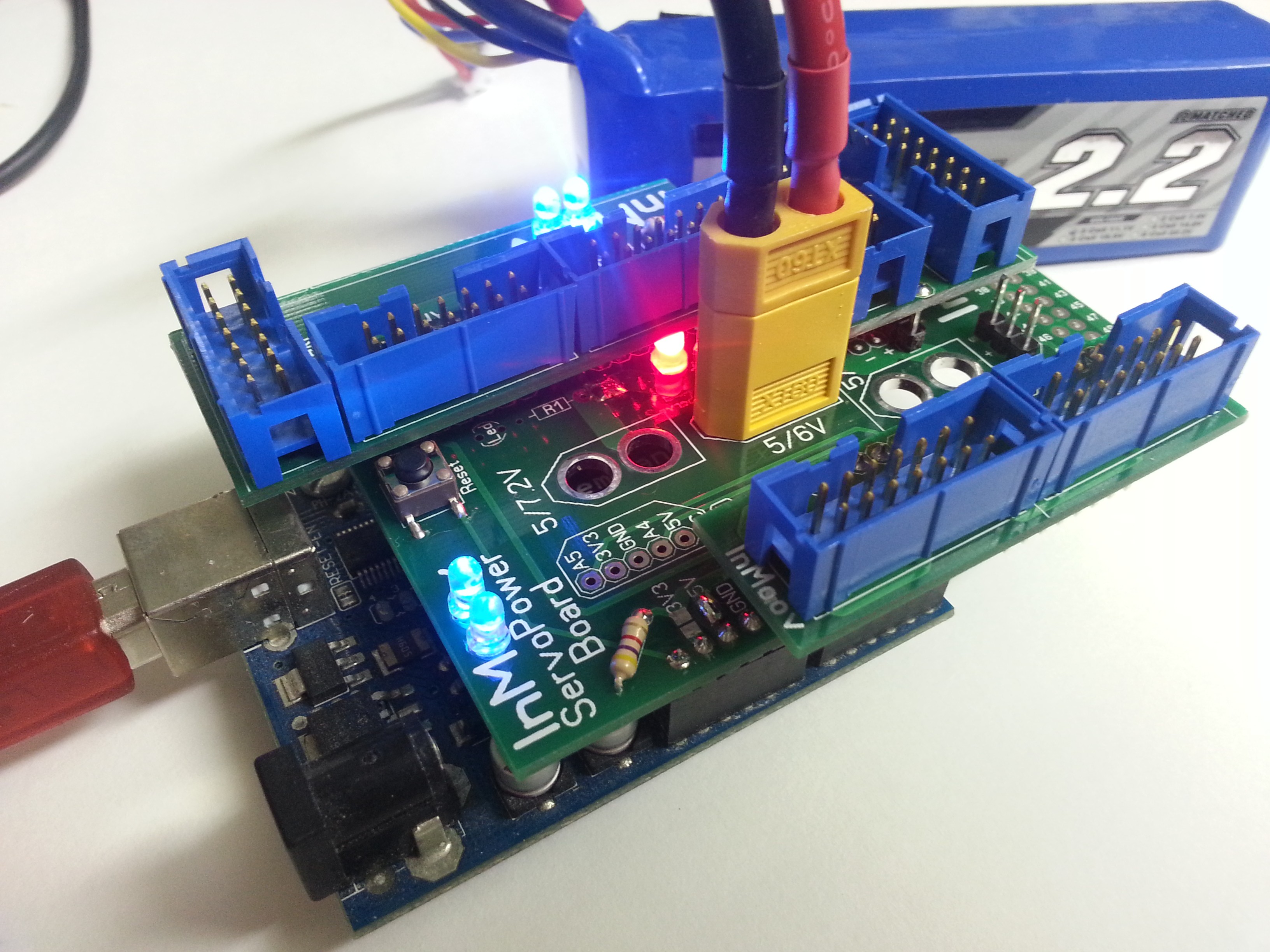
Ecco come si presenta la shield board una volta saldati tutti i componenti su di essa.
Il software MyRobotLab
Per quanto riguarda il software che sta alla base di tutto il progetto InMoov è MyRobotLab. MyRobotLab è un framework open source programmato in Java progettato per essere usato sia nel campo della robotica che per altre tipologie di automazioni.
Questo software fornisce una serie di strumenti che permettono di aggiungere nei progetti di robotica alcune caratteristiche avanzate:
- machine vision utilizzando Javacv/Opencv,
- speech recognition con Sphinx4,
- text to speech con FreeTTS,
- Motor Control,
- Servo control,
- GUI control,
- comunicazione tramite microcontrollori (Arduino).
Istruzioni per iniziare con MyRobotLab (MRL)
Scaricate l’ultima release dal sito ufficiale. Si tratta di un file chiamato myrobotlab.jar.
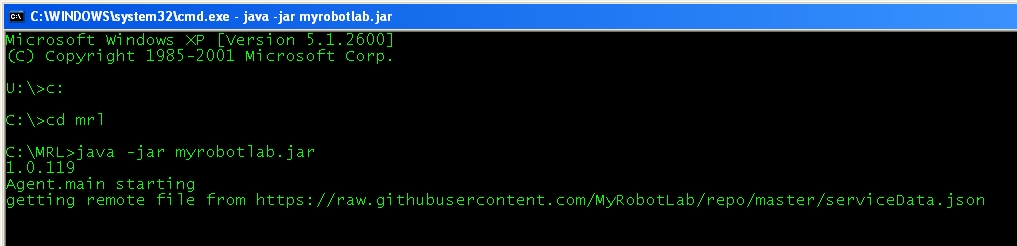
Create una directory mrl in cui inserire il file JAR appena scaricato, poi una volta fatto, fate partire una sessione (DOS su Windows) e lanciate dall’interno della directory il comando:
java -jar myrobotlab.jar
Partirà il downloading e l’installazione di tutte le componenti necessarie per avviare l’applicazione.
Poi, una volta completata l’installazione partirà l’applicazione MyRobotLab.
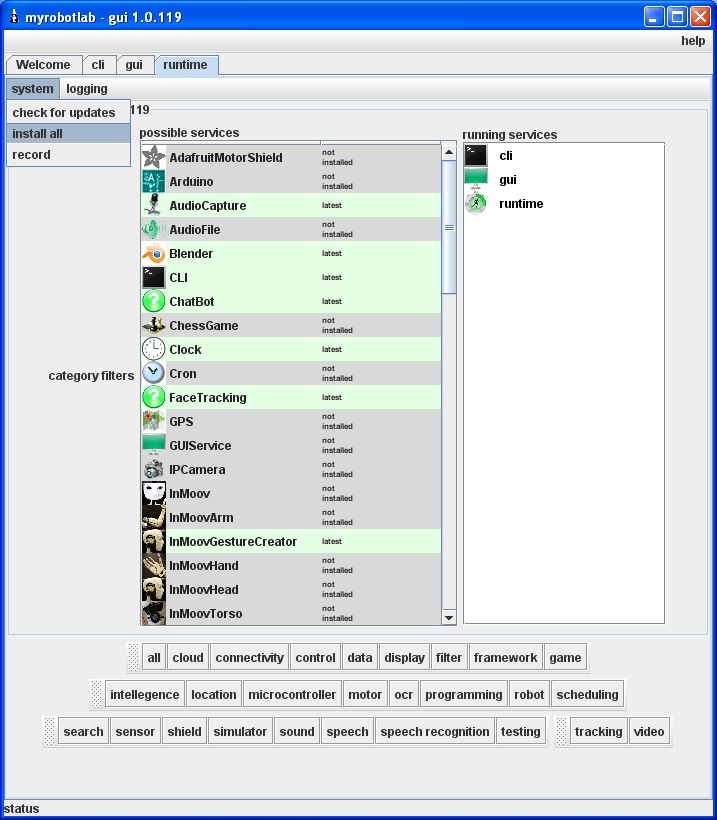
Se selezionate il pannello runtime puoi vedere tutti i moduli che contribuiscono alla gestione delle varie parti del robot, compresi moltissimi tool e servizi che incrementano le potenzialità di InMoov. Dal pannello è possibile vedere lo status di tutti i moduli: grigio quelli non installati, in verde quelli installati. A destra della finestra è possibile vedere quali moduli sono attualmente attivi (servizi). Per installarli tutti è possibile selezionare dal menu System->Install All (vedi Figura sotto), altrimenti si seleziona il modulo desiderato cliccandoci sopra, e poi con il Context Menu (tasto destro del mouse) si seleziona Install e si installa così solo il modulo selezionato.
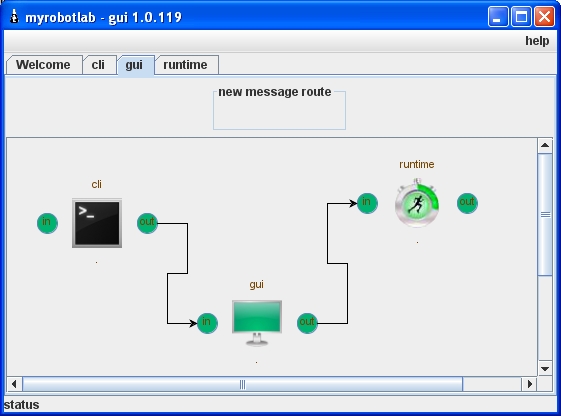
I servizi una volta attivati possono essere programmati “graficamente” progettando uno schema in cui i dati in uscita di un servizio vengono passati come input ad un altro servizio.
Progetto affascinante. Il prossimo “passo” dovrebbe essere quello di dargli delle gambe e la capacità di camminare.