Inverse Kinematics
When we talk about inverse kinematics we mean the set of methodologies that allow to determine the motion of a robot to reach a desired position. But there is no better way to explain what inverse kinematics is than with a practical example …
The 2-link and 2-joint manipulator
Let’s consider the simplest robot model.
Suppose we have a manipulator consisting of two links and two joints bent in the corners  and
and  , respectively. The effective end will be at a position A defined by the
, respectively. The effective end will be at a position A defined by the  coordinates. This is the starting position.
coordinates. This is the starting position.
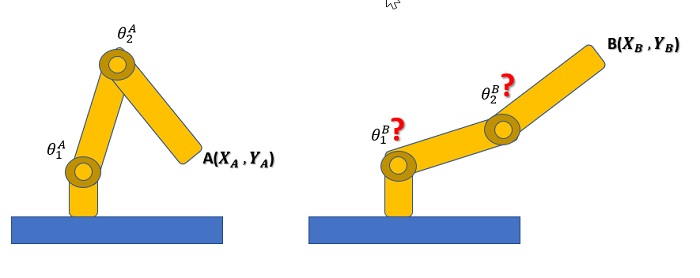
Now, however, the effective end to work will have to move to a new position B having  coordinates. What will be the two new angles
coordinates. What will be the two new angles  and
and  that the two joints will have to assume in order for the effective end to be correctly in position B ?
that the two joints will have to assume in order for the effective end to be correctly in position B ?
This is a classic Inverse kinematics problem.
How to solve ?
In order to solve this problem it will be necessary to use the direct kinematics equations of the manipulator. Since these equations are not linear, finding a solution is certainly not that easy and straightforward. Furthermore, the solution is often not unique. In fact, it is possible to have different combinations of joint angles to obtain the same desired position (x, y). These aspects increase the greater the complexity of the manipulator system under study.
Even the simplest case, that is the case we have considered, that of a manipulator with two links and two joints, presents some difficulties.
- not all positions (x, y) are reachable from the effective end and in this case there are no solutions in the equations.
- there can be two solutions, corresponding to two different configurations of the manipulator (elbow up and elbow down).
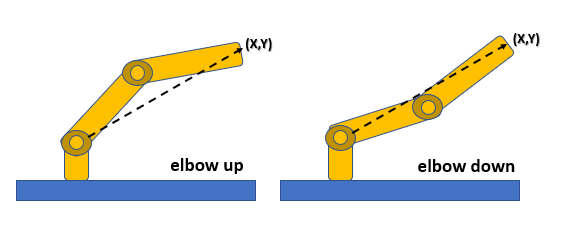
Let’s solve the problem analytically by considering the following diagram:

The law of cosines can be used to derive the angle θ2


An easier way will be to consider instead sin(θ2).

And therefore, θ2 can be derived as

With this type of analytical approach it is possible to consider both solutions (elbow-up and elbow-down configurations) by choosing the positive and negative signs in the equation.

As can be seen from the above equation, we deduce that the angle θ1 depends on θ2. This evaluation is plausible since this angle will absolutely depend on which solution it is chosen for θ2
Inverse kinematics for more complex cases
Therefore the inverse kinematics problems are based on the determination of a set of possible joint configurations that allow to reach the effective end at the desired point.
From the application point of view, numerous techniques and methods have been created, which mainly make use of algorithms with numerical calculations to be performed on a computer at the base. Despite this, even today these methods suffer from yet another computational cost, and often results are not always realistic..
In the next articles we will illustrate some application cases and some of these calculation techniques.