Benvenuti nella Sezione di Robotica
Benvenuti nella nostra sezione dedicata alla Robotica, un universo entusiasmante in cui la programmazione si fonde con la meccanica per dar vita a macchine intelligenti e interattive. Qui, esploreremo il vasto campo della robotica utilizzando il potente linguaggio di programmazione Python
[wpda_org_chart tree_id=39 theme_id=50]Che cos’è la Robotica?
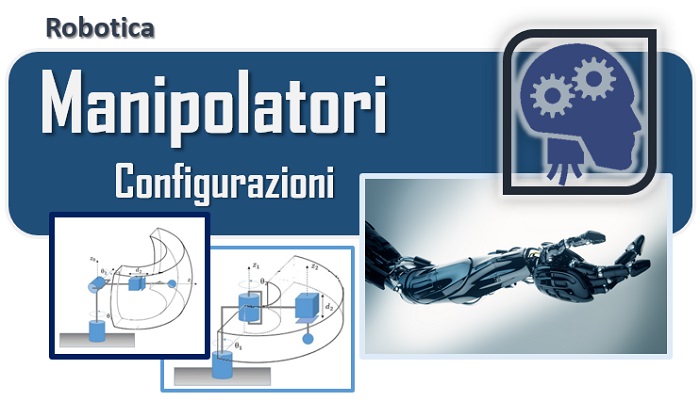
La robotica è la disciplina che si occupa dello studio, progettazione e creazione di robot. I robot sono dispositivi automatici o telecontrollati, spesso utilizzati per eseguire compiti ripetitivi, pericolosi o complessi. Essi possono variare dalle piccole unità autonome agli imponenti robot industriali, dalle piattaforme mobili agli esseri antropomorfi.
Perché Python?
Python è un linguaggio di programmazione versatile, noto per la sua sintassi chiara e leggibile. È ampiamente utilizzato nella comunità della robotica grazie alla sua flessibilità e alla vasta gamma di librerie e framework disponibili. Con Python, è possibile sviluppare rapidamente applicazioni robotiche, implementare algoritmi di intelligenza artificiale e controllare i movimenti dei robot in modo intuitivo.
Cosa Troverete Qui
- Introduzione ai Concetti di Base: Scopri i principi fondamentali della robotica, dalle tipologie di robot alle basi dell’elettronica e dell’idrodinamica.
- Guida alla Programmazione con Python: Apprendi le nozioni essenziali della programmazione in Python, con un focus specifico sugli strumenti e le librerie utili per la robotica.
- Progetti Pratici: Metti in pratica le tue conoscenze con esempi pratici. Da robot giocattolo a bracci robotici, esplorerai una serie di progetti passo-passo.